科学家计划用蜂群机器人在火星寻找生命(图)
日前,科学家认为采用像蜜蜂一样的自治微型机器人群是对火星洞穴进行勘测的最佳策略,并有望能够发现火星洞穴中神秘生命。
火星大气层甲烷跟踪分析显示未被发现的活跃性——潜伏在火星表面之下的地质学或者生物学迹象。英国南安普敦大学工程师阿伦-基斯迪(Aron Kisdi)说:“火星表面之下存在着令科学家感兴趣的事物,我们只需要找到它。”
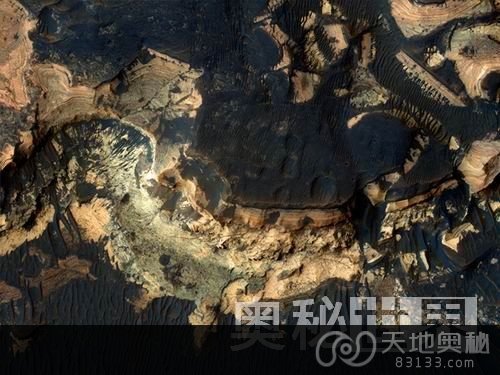
机器人搜索是对近期发现的几处火星新洞穴的最佳勘测方式,可实现最大化搜寻范围和最小化搜索时间。2007年,美国宇航局“奥德赛”探测器在火星表面发现7处较大的洞穴,由于它较大、较深,无法使探测器进入进行勘测。同时,奥德赛探测器的分辨率不适合于洞穴勘测,仅适用于较小的洞穴。
基斯迪说:“我们派遣机器人在火星进行勘测已有多年,但我们仅能观测到小部分火星区域。”对于这种蜂群式机器人搜索策略,他计划使用一种滚动、跳跃式机器人——“Jollbot”。火星登陆器可释放40-60个小型机器人自治随意地在火星表面搜寻洞穴,其方法与蜜蜂寻找蜂巢十分相似。
当小型机器人通过感受温差发现洞穴时,将以捷径路线返回登陆器,无线上传洞穴的坐标和温度。之后,它检测其它蜂群机器人反馈至登陆器的信息资料,从而确定是否开始新的探索,或者勘测其它机器人已探索过的洞穴。如果机器人能现场勘测到重要信息,将上传给登陆器并开始信息处理。
经过几次反复,研究人员提出了一致意见:要么派遣足够数量的机器人寻找较好的勘测地点,并将相关信息上传至任务控制中心,要么就是对既定地点直接深入勘测。基斯迪称,这种简单的策略可使蜂群机器人使用主要动力进行移动,而不是运行程序,同时这种机器人制造成本低廉。如果损失了一个机器人,但这项搜寻工作却并未终止。
美国宇航局喷气推进实验室火星计划科学管理员大卫-贝蒂(David Beaty)说:“机器人勘测火星表面非常棘手的是如何为机器人提供动力,火星表面与地球大陆表面相似,从一个洞穴旅行至另一个洞穴会相隔数百公里。”
贝蒂并不清楚当前美国宇航局所开发的任何蜂群机器人搜寻项目,但他指出如果基斯迪搜寻计划中的机器人可持续长时间运行,且灵活移动,那么这项计划则具有可行性。在基斯迪的这项模拟中,50个蜂群机器人在5天内可覆盖搜索300平方米范围。其搜索范围可通过增加更多的机器人和更长的搜寻距离得到拓展。
基斯迪说:“我计划下一步升级机器人的硬件系统,我将继续坚持这一勘测策略,直至实现火星探索。”
上一篇:上一篇:美国56岁盲人划小舟从古巴前往美国
下一篇:下一篇:12张古图画揭露外星人UFO存在真相!







- 啪啪啪
- 女人图片黄一点图片
- 自慰
- 舔老婆
- 车震
- 马赛克
- 欧美
- 野战
- 真实
- xxoogif
- 美女被
- 肉图
- 办公室
- 39秒
- 不看后悔
- 有声
- 声音
- 狂射
- 无遮无挡
- 男上女下
- 狂日
- 贼好笑
- 强姧
- 男的和女的啪啪啪
- 嘿咻嘿咻
- 操逼
- 叉女人
- 大吴哥
- 出处
- qq天空网
- 邪恶吧
- 没内涵
- 大奶子
- 李毅吧
- 搞笑吧
- 后式入
- 动态图片吧
- 美女动态啪啪图
- 做嗳啪啪啪视频图
- 糗
- 口交
- 性绞
- 做爱
- 做僾
- 做艾
- 36D
- 天堂
- 成人gif
- av
- 潮吹
- 涩涩
- 揉胸
- 另类
- 黄色
- 福利
- 爱爱图片
- 后入式
- 27报
- 嘿咻
- 男女做爱
- h动态图
- 色你妹
- xxoo
- 撸管
- 露b
- 男人叉女人
- 卵蛋网
- 哈哈mx
- 性插图
- 电车痴汉
- 前入式
- 动态图
- 做爱动态图
- 啪啪
- 美女动态啪啪图
- 啪啪啪动态图
- 动图
- 美女动态图
- 操逼视频
- 美女动态
- 男女啪啪啪
- 邪恶的天堂
- 啪啪啪啪动态图
- 拍拍拍
- 啪啪啪动态
- 口绞姿动态图
- 邪恶萝莉
- 福利图
- av动态图
- 家教小故事
- caobi
- 女人自熨图片
- 邪恶gif动态图
- 黄色美女
- 邪恶动态图吸奶
- 邪恶美女
- 美女操逼
- 黄图片
- 叉叉叉
- 叼嘿
- 美女爱爱
- 女性图片
- 彩色漫画
- 动态美女图片
- gif出处高清视频
- gif动图
- 52kk
- 涩涩爱得得撸夜夜
- 动态插图很黄图片
- 27报
- xxoo
- 100经典出处gif动态图
- 邪恶gif
- 邪恶动态图27
- 操逼图
- 动态图出处及番号2017
- 美女动态图片
- 插图
- 邪恶动态图27报
- 美女做爱图片
- 啪啪啪gif
- gif邪恶动态图
- 口绞姿动态图
- 日比
- 邪恶帮
- 办公室诱惑
- 叉叉
- 028nb
- 黄色照片
- 邪恶动态图后式入叉
- 真人做爱
- 我爱爆
- 福利图片
- 干美女
- 福利动态图
- h动态图
- 动态黄图
- 美女口交
- xxoogif
- 爱爱图片全部过程图片
- 办公室偷吻
- 动态色图
- 邪恶少女漫画无翼鸟mhkk
- 操b图片
- 后进式
- 男女图片
- 美女自慰图片
- 美女黄色图片
- 美女自慰图
- 奶子图片
- 日本后式入动态图
- 邪恶动态图第五十七期
- xxo
- 邪恶集
- 邪恶动漫
- 邪恶古堡
- 邪恶色系漫画
- 邪恶少女
- 邪恶帝
- 邪恶爱
- 邪恶漫画无翼鸟
- 邪恶漫画大全
- 邪恶漫画基地
- 内涵漫画
- 色系军团
- 卡列漫画
- 幻啃漫画
- 美乳
- 美臀
- 黑丝
- 车模
- 裸身
- 粉嫩
- 比基尼
- 床照
- 空姐
- 超短裙
- 情趣内衣
- 白嫩
- 街拍
- 萝莉
- 少女
- 非主流
- 韩国
- 尤物
- 自拍
- 私房
- 长发
- 浴室
- 湿身
- 真空
- 时尚
- Cosplay
- 日本
- 巨乳
- 校花
- 古典
- 推女神
- 御姐
- 旗袍
- 学生妹
- AV女优
- 足球宝贝
- 网袜
- 丁字裤
- 熟女
- 白丝
- 人体艺术
- 腿模
- 台湾
- 短发
- 气质
- 少妇
- 女仆装
- 高跟
- 护士
- 女神
- 写真
- 性感
- 妹子
- 爆乳
- 情趣
- 大尺度
- 制服
- 清纯
- 酥胸
- 嫩模
- 翘臀
- 正妹
- 丰满
- 胸部
- 风骚
- 湿身
- 大奶
- 大波
- 长腿
- 可爱
- 小清新
- 学生
- 养眼
- 丝袜
- 胸器
- 童颜
- 透视
- 一字马
- 萌妹子
- 软妹子
- 主播
- 女仆
- 裸体
- 包养
- 后背摇
- 社会摇
- 丰臀
- 丰乳
- 纤腰
- 泳衣
- 女神撸
- 真实自拍
- 女警
- 快手福利视频
- 黑丝美腿
- 皮裤






-
1

海底世界神秘复杂,据说有18件稀罕物沉默在海底。连著名的泰坦尼克号也仅能排在第九位。那么这些稀罕物到底是什么呢? 密歇根湖巨石阵 在密歇根湖中 出现湖底像巨石阵 密歇根湖...详细>>
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11